Роботов-тараканов научили взаимопомощи
 6 мая 2016
6 мая 2016
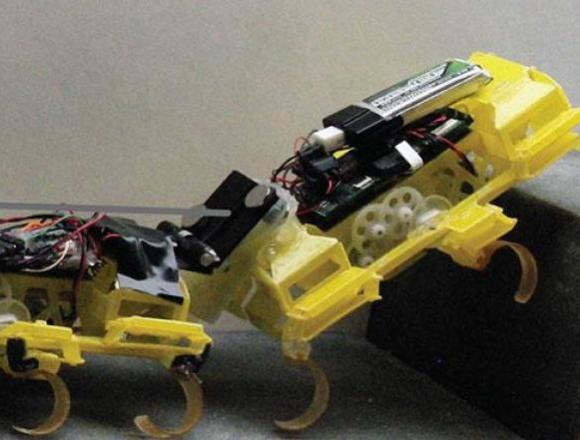
Фото: UC Berkeley
Разработка предполагает взаимовыгодное взаимодействие роботов при преодолении препятствий. Один робот из пары оснащен магнитным тросом с разъемом, который легко застегивается на «спине» второго. На роботах установлены излучатели сигнала и приемники. Когда роботы походят к препятствию, второй робот приподнимается, чтобы забраться, а первый подталкивает его, пристегивается тросом к разъему и помогает второму забраться на препятствие. Трос также может использоваться, чтобы вытащить одного из пары роботов наверх из возможных ловушек. Таким образом, пара роботов может работать как один модульный робот, а также роботы могут поодиночке выполнять собственные задания.
Как полагают разработчики, группа минироботов может применяться в строительстве, на заводах, и для спасательных работ в экстремальных ситуациях, в очагах природных и техногенных катастроф. Группы роботов, подталкивая и вытягивая друг друга, смогут подниматься и спускаться по обломкам безо всякого вреда, и смогут проникнуть практически в любое недоступное человеку место.
Разработка будет показана на на конференции Общества робототехники и автоматизации ICRA-2016 (International Conference on Robotics and Automation), которая пройдет с 6 по 21 мая в Стокгольме.
Ранее на основе роботов VelociRoACH ученые создали другой тандем: робот-таракан объединился с орнитокоптером, образуя для него платформу для взлета.
- 18 апреля 2024 РЕДМЕТ-2024
- 25 марта 2024 В мире будет расти глобальная конкуренция за обладание редкоземельным сырьем — Андрей Шевченко
- 21 марта 2024 Ассоциация РМ и РЗМ и Национальная ассоциация производителей источников тока «РУСБАТ» заключили соглашение о сотрудничестве Новости 21 марта 2024
- 19 марта 2024 Руслан Димухамедов выступил на III отраслевой конференции «Редкие и редкоземельные металлы»
- 18 марта 2024 Журнал «Редкие земли» на заседании Горного совета Северо-Западного федерального округа
- 18 марта 2024 Горнорудный дивизион Росатома расширяет выпуск редкоземельной продукции. При участии СМЗ выплавлен первый слиток металлического тантала
- 15 марта 2024 Соликамск отметил день рождения магниевого завода
- 7 марта 2024 III Отраслевая конференция «Редкие и Редкоземельные металлы»
- 2 марта 2024 Владимир Путин поручил нацелить геологоразведку на поиск редкоземельных материалов и другого сырья для экономики
- 16 февраля 2024 Замминистра ответил на вопросы журнала Редкие земли
- 15 февраля 2024 Андрей Андрианов о запуске в России производства постоянных редкоземельных магнитов
- 15 февраля 2024 Ключевые успехи российской промышленности представили на выставке-форуме «Россия»
- 13 февраля 2024 Дойти до конца цепочки
- 12 февраля 2024 Журнал «Редкие земли» на Торжественном вечере, посвящённом 300-летию Российской академии наук
- 7 февраля 2024 «Нет ничего выше и прекраснее, чем давать счастье многим людям», — Людвиг ван Бетховен.